Stevens Institute of Technology,
Castle Point on Hudson, Hoboken- NJ 07030
Tanzania
Research Article
Linear and Nonlinear Kinematic Synergies in the Grasping Hand
Author(s): Vrajeshri Patel, Martin Burns, Zhi-Hong Mao, Nathan E Crone and Ramana VinjamuriVrajeshri Patel, Martin Burns, Zhi-Hong Mao, Nathan E Crone and Ramana Vinjamuri
Kinematic synergies in human hand movements have shown promising applications in dexterous control of robotic and prosthetic hands. We and others have previously derived kinematic synergies from human hand grasping movements using a widely used linear dimensionality reduction method, Principal Component Analysis (PCA). As the human biomechanical system is inherently nonlinear, using nonlinear dimensionality reduction methods to derive kinematic synergies might be expected to improve the representation of human hand movements in reduced dimensions. In this paper, we derived linear and nonlinear kinematic synergies from linear (PCA), globally nonlinear (Isomap, Stochastic Proximity Embedding (SPE), Sammon Mapping (SaM), and Stochastic Neighbor Embedding (SNE)) and locally nonlinear (Local Linear Embedding (LLE), LaplacianEigenmaps (LaE), and Local Tangent Space Alignment (LTSA)) dimensi.. Read More»
DOI:
10.4172/2155-9538.1000163
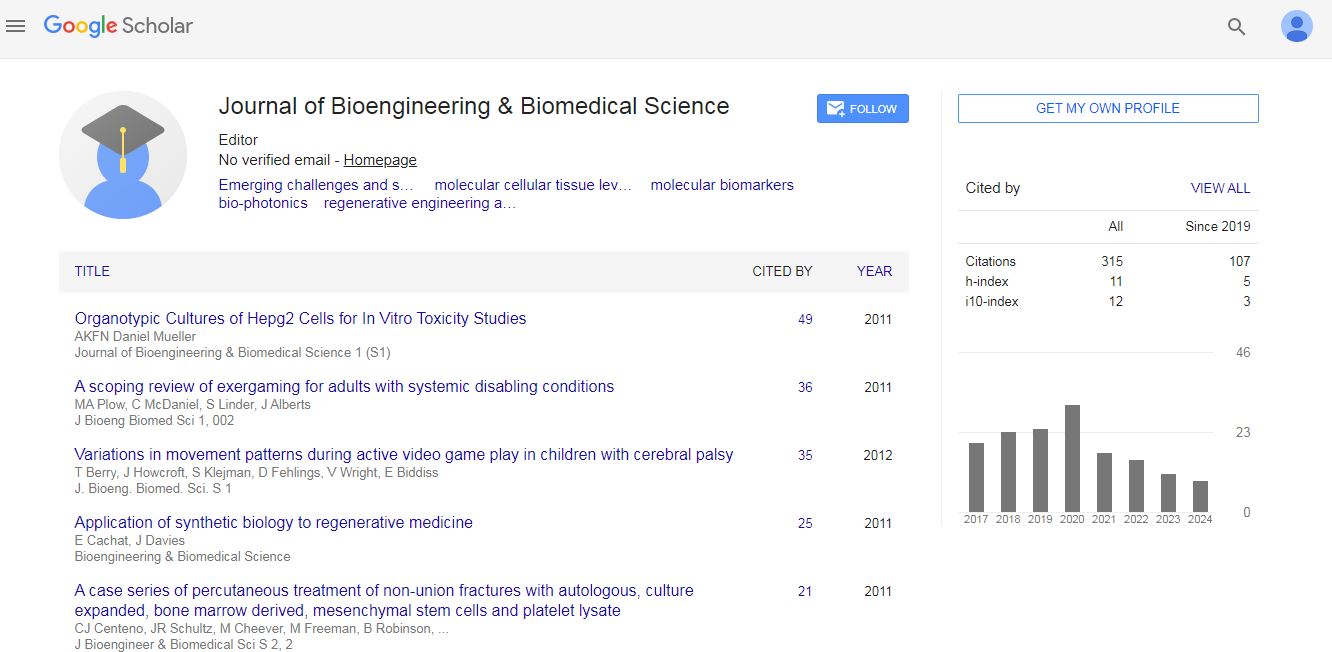
Journal of Bioengineering & Biomedical Science received 307 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 