Department of Mathematics, Kharkiv National University, Kharkiv, Ukraine
Short Communication
Mathematical Simulation of 3-DOF Robot-manipulator Dynamics Using Software Control
Author(s): Kathryn Leech*
DOI:
10.37421/2168-9679.2023.12.533
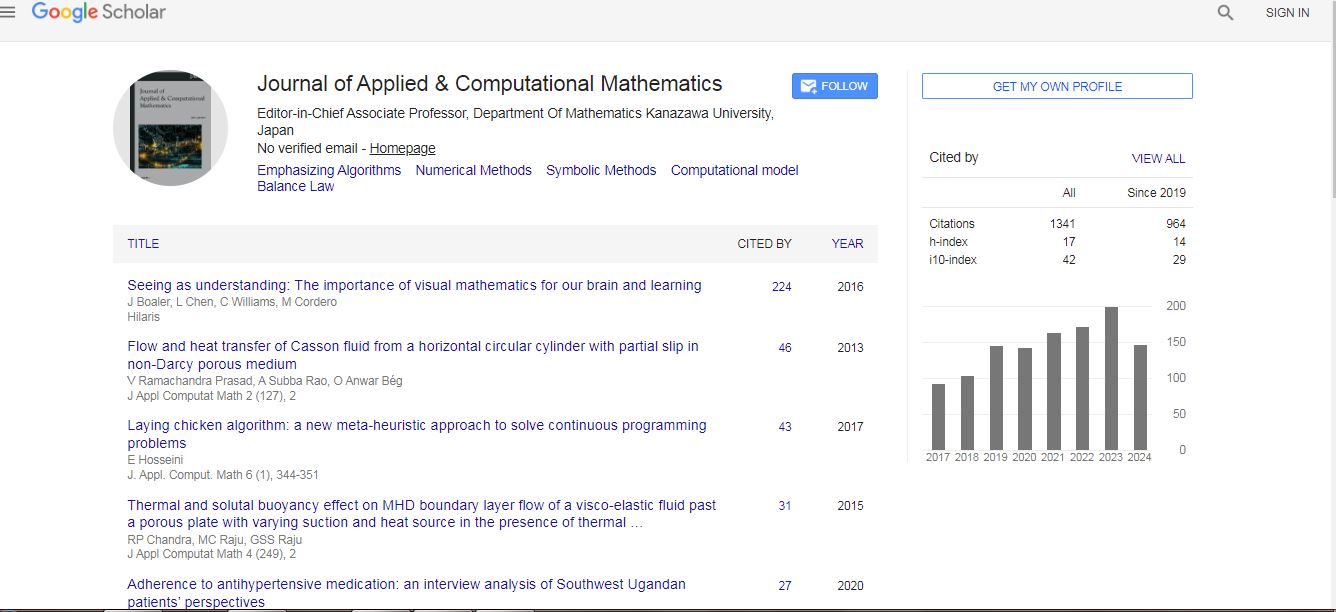
Journal of Applied & Computational Mathematics received 1282 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 