School of Mathematics and Statistics, University of Melbourne, Victoria 3010, Australia
Editorial
Dynamics of Parallel Kinematic Manipulators with Hybrid Limbs are Modelled Using a Constraint Embedding Approach
Author(s): Qian Braatz*
DOI:
10.37421/2090-0902.2022.13.375.
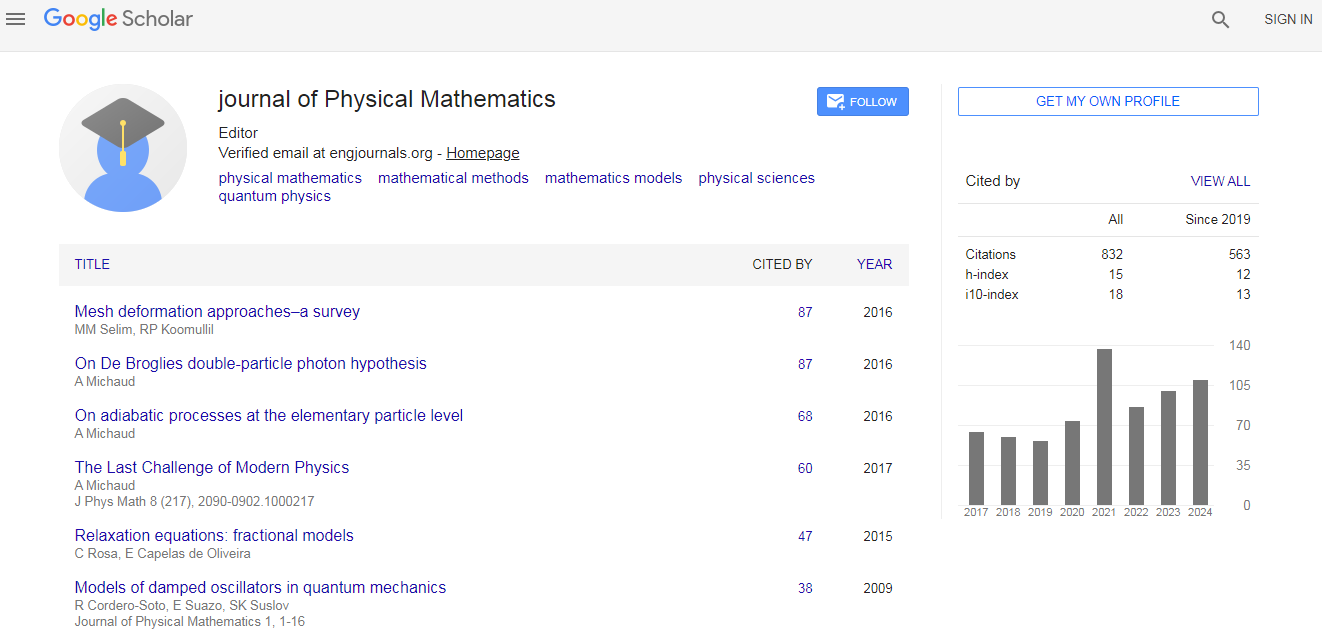
Physical Mathematics received 686 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 