Editorial - (2022) Volume 11, Issue 5
Received: 05-May-2022, Manuscript No. iem-22-70318;
Editor assigned: 07-May-2022, Pre QC No. P-70318;
Reviewed: 12-May-2022, QC No. Q-70318;
Revised: 18-May-2022, Manuscript No. R-70318;
Published:
23-May-2022
, DOI: 10.37421/2169-0316.2022.11.355
Citation: Yirga, Luis. “An Editorial Note on Automotive Radar
Applications.” J Ind Eng Manag 11 (2022): 355.
Copyright: © 2022 Yirga L. This is an open-access article distributed under the
terms of the Creative Commons Attribution License, which permits unrestricted
use, distribution, and reproduction in any medium, provided the original author
and source are credited.
The use of radar in automobiles is growing. Automotive radar systems are the key sensor in autonomous driving assistance systems and are the main sensor used in adaptive cruise control (ADAS). Automotive radar is one of many sensor systems used in ADAS for collision avoidance, bike and pedestrian identification, and as an addition to vision-based camera-sensing systems. Pulse-Doppler radar is not typically employed; instead, frequency-modulated continuous-wave radar, or FMCW radar, is used. Compared to pulse-Doppler radar, millimeter FMCW's analog and RF gear is significantly less expensive. Furthermore, the demands for digital processing are typically low and can be met by inexpensive field programmable gate arrays, microprocessors with specialized acceleration engines, or specialized application-specific integrated circuits. In automobile applications, the signal to be processed can be obtained by an engine control unit sensor or by an ultrasonic sensor, radar sensor, camera, LIDAR, or GPS. Applications for short-range radar (SRR) and longrange radar (LRR) are the two main categories for radar sensing. The SRR can occasionally cover the mid-range. For some of the most important applications, we offer typical radar specifications.
As a response to these requests, automakers have begun including Driver Assistance Systems (DAS) in production vehicles. We specifically think of traction control, anti-lock brakes, stability control systems, anti-collision systems, seat belts, airbags, shock-absorbing bumpers, anti-intrusion bars, visual systems, and electronic brakeforce distribution (EBD) (VDAS). The majority of VDAS use cameras. They are frequently utilized as front or rear parking assist systems, as well as lane vision systems. Video cameras require outside lighting since the sensor cannot function in poor lighting, inclement weather (such as rain, fog), or when there is smoke present. Radar technologies can get over these restrictions. Radar-based devices are least affected by fog or heavy weather and can detect targets hundreds of meters away. There are currently a number of technology options for car radar imaging systems. The devices create a beam that scans the desired area to find targets, either analogically or digitally. There are many approaches to achieve analog synthesis and beam scanning, including phased arrays, travelling wave antennas, and lens antennas. A phased array is the architecture that performs best in terms of resolution and scanning range. Finding a balance between cost and effectiveness is crucial because this solution is also the most expensive. To synthesize a wider array, one option is to properly handle the signals from numerous antennas. Another option is to divide the array into identical subarrays, the feed of each of which would be used in a modular design [1-3].
The radars currently in use in the automotive industry are based on the Ultra-wide Band structure during the post-processing step. The majority of algorithms designed to clean up or reduce noise in data and categorize targets are based on statistical analysis of backscattered radar returns, followed by a statistical classification that enables identifying the category to which the observed object belongs. Statistical models are fitted to the data for both detection and classification in order to evaluate their adequacy and affirm or deny a target's membership in the suggested class. Automotive radar is a significant CMOS radar application that is becoming a critical technology for intelligent and autonomous features in contemporary automobiles, including features that relieve drivers of tiresome jobs, lessen driver stress, and add life-saving automatic interventions. Adaptive cruise control and automatic emergency breaking, which allow a vehicle to abruptly slow down without the driver's intervention in order to avoid a potential collision, are just two of the essential safety and comfort features that have recently been made possible by the implementation of automotive radar in many high-end cars. Due to the expensive expense of sensor technology, the usage of these functions has only been possible in high-end automobiles up until this point.
Because RF MEMS devices, such switches and phase shifters, have nearly excellent signal characteristics, they are a very intriguing technology for 76 to 81 GHz vehicle radar. Alternative beam-steering technologies made possible by micro-electromechanical tunable components are included in this chapter. RF MEMS demos and various RF MEMS components have all been shown. Since it is challenging to solve reliability issues such contact stiction or dielectric charging of isolation layers and to implement low-cost packaging solutions that provide both package hermeticity and strong RF feedthroughs, developing RF MEMS components still needs a significant amount of work. A small number of businesses have been successful in creating RF MEMS components and circuits that meet client demands for electrical performance and reliability. For example, switches already have a lifespan that is 100 times longer than mechanical RF relays [4,5].
None
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
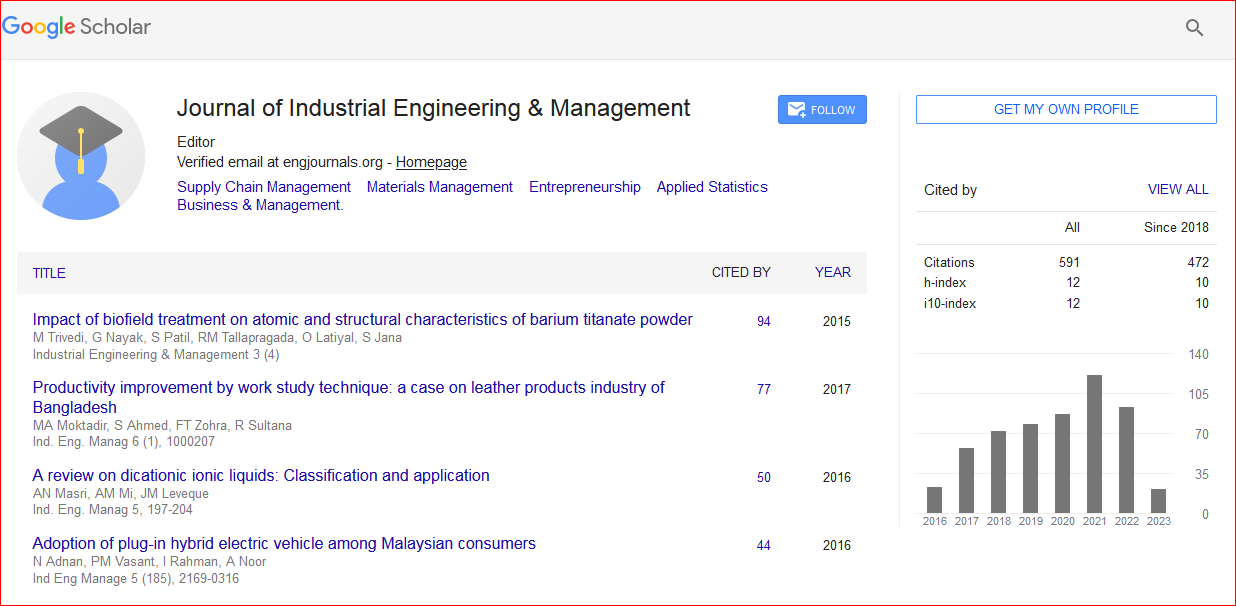
Industrial Engineering & Management received 739 citations as per Google Scholar report