Brief Report - (2022) Volume 13, Issue 4
Received: 19-Mar-2022, Manuscript No. jbsbe-22-68130;
Editor assigned: 21-Mar-2022, Pre QC No. P-68130;
Reviewed: 26-Mar-2022, QC No. Q-68130;
Revised: 04-Apr-2022, Manuscript No. R-68130;
Published:
09-Apr-2022
, DOI: 10.37421/2155-6210.2022.13.327
Citation: Persil, Erin. "Bio-inspired Navigation Control by Mobile
Robots." J Biosens Bioelectron 13 (2022): 327.
Copyright: © 2022 Persil E. This is an open-access article distributed under the
terms of the Creative Commons Attribution License, which permits unrestricted
use, distribution, and reproduction in any medium, provided the original author
and source are credited.
In the last decade, the notion of bio-inspired artificial intelligence has been proposed. A biologically inspired neural network is a form of neural network that can guide a robot through a changing environment while avoiding obstacles and approaching an objective. Many academics have concentrated on algorithms that mimic complicated neural networks in cognitive functioning in humans and animals during the last fifty years. The creation of these algorithms is a critical step and a difficult problem in mobile robot navigation. Computational neuroscience and neural engineering are two areas where neural systems have been created. The fundamental theory has been encapsulated in [1]. Yang and Meng introduced a novel real-time shunting path planning model based on Hodgkin and Huxley's membrane neural network in computational neuroscience, and proved online control in mobile robot navigation through simulations.
Gutnisky and Zanutto used an operant learning model in mobile robot obstacle avoidance in neural engineering and robotic learning. They came to the conclusion that reinforcement learning outperforms the Q-learning method. Chang and Gudiano proposed a significant model for robot approach and avoidance behaviours based on Grossberg's brain model of conditioning.
Despite these advancements, implementing and adapting algorithms to real robots remains a challenge. They also face an issue of viability due of the high computing expenses. This work presents a bio-inspired local pathplanning strategy that [2].
Various sensors and bioinstrumentation devices for biological and medical purposes have been inspired by animal senses, which encompass a wide variety of signal types and bandwidths. Insects like desert ants and honeybees, for example, use polarised skylight pattern-based information to navigate. They consistently return to their nests and hives from distances of hundreds of kilometres. The dorsal rim region of the compound eyes and the polarisation sensitive neurons in the brain are involved in the insect navigation system. Photoreceptors with orthogonally oriented little hair-like structures called microvilli are found in the dorsal rim region. These are specialised sensors designed to detect polarised skylight patterns. Various research groups have been developing revolutionary navigation systems based on polarised light [3].
In complicated natural habitats, insects conduct a wide range of sophisticated activities over enormous geographical and temporal dimensions. A mechanistic knowledge of insect cognition can inspire bio-based solutions for autonomous robotics and has direct consequences on how brains integrate multimodal information. Virtual Reality allows researchers to examine insect neuroethology while exposing them to complex, yet controlled stimuli. The utilisation of insects as inspiration for artificial systems, recent breakthroughs in diverse VR technologies, existing knowledge gaps, and the possibility for insect VR research to be applied to bio-inspired robots are all discussed in this paper. Finally, we stress the need of diversifying our model species and behavioural paradigms, as well as embracing the natural world's complexity. This will aid our understanding of the immediate and ultimate causes of brain and behaviour. [4,5].
Due to the turbulent nature of airflows and the accompanying olfactory plume characteristics, robotic odour source localization has been seen as a difficult problem. Designing an effective olfactory-based navigation algorithm, which helps a plume-tracing robot to discover the odour source by tracing released plumes, is critical to addressing an OSL challenge. This article provides a behavior-based navigation algorithm for use on a mobile robot to identify an odour source in an unknown area, inspired by the mate-seeking behaviour of male moths. We build a fuzzy controller to detect the environment and alter trajectory parameters based on the current search scenario, unlike typical bio-inspired algorithms that employ preset parameters to create robot search trajectories. As a result, the robot can automatically adjust the search scale.
None.
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
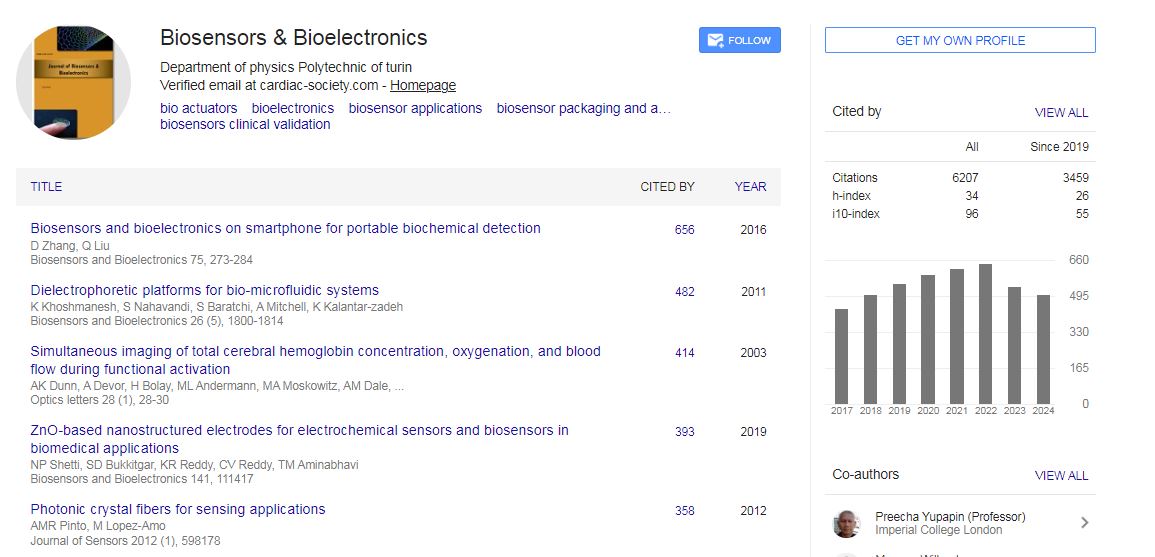
Biosensors & Bioelectronics received 6207 citations as per Google Scholar report