Mini Review - (2023) Volume 17, Issue 1
Received: 27-Jan-2023, Manuscript No. glta-23-95066;
Editor assigned: 30-Jan-2023, Pre QC No. P-95066;
Reviewed: 14-Feb-2023, QC No. Q-95066;
Revised: 18-Feb-2023, Manuscript No. R-95066;
Published:
25-Feb-2023
, DOI: 10.37421/1736-4337.2023.17.378
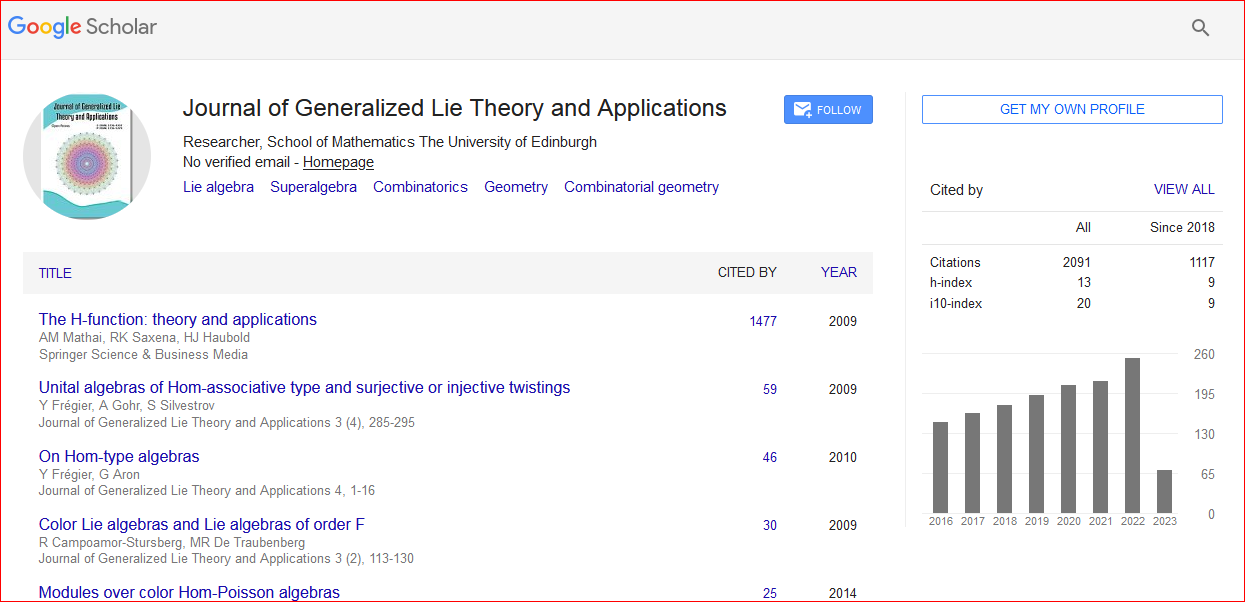
Citation: Stirling, Julian. “Understanding Control Theory: Basics, Applications and Types of Controllers.” J Generalized Lie Theory App 17 (2023): 378.
Copyright: © 2023 Stirling J. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Control theory is an interdisciplinary branch of engineering and mathematics that deals with the study of the behavior of dynamic systems and the design of feedback control systems that can regulate and stabilize these systems. Control theory has a wide range of applications, including aircraft and spacecraft control, process control, robotics and many others. In this essay, we will provide an overview of control theory, its key concepts and principles and its applications.
AFM • Control theory • Feedback • Scanning probe microscopy
The basic idea of control theory is to regulate the behavior of a dynamic system by applying feedback. A dynamic system is any system that changes over time, such as a mechanical system, an electrical system, a chemical process, or a biological system. In control theory, we describe the behavior of a dynamic system using mathematical models, which are typically represented by differential equations or difference equations. The feedback control system consists of four main components: the plant, the sensor, the controller and the actuator. The plant is the system that we want to control, such as a robot arm or a chemical reactor. The sensor measures the output of the plant, such as the position of the robot arm or the temperature of the reactor. The controller computes the control input based on the measured output and the desired setpoint. Finally, the actuator applies the control input to the plant to change its behavior.
The goal of control theory is to design a feedback control system that can regulate the behavior of the plant to achieve a desired performance. The performance criteria are usually specified in terms of stability, accuracy, speed and robustness. Stability refers to the ability of the control system to maintain the desired behavior of the plant in the presence of disturbances or uncertainties. Accuracy refers to the ability of the control system to track the desired setpoint with minimum error. Speed refers to the ability of the control system to respond quickly to changes in the setpoint or the disturbances. Robustness refers to the ability of the control system to maintain its performance in the presence of modeling errors, parameter variations, or sensor noise [1].
The design of a feedback control system involves several steps. The first step is to identify the mathematical model of the plant, which describes its behavior in terms of input-output relationships. The model can be obtained through experimental data, physical laws, or theoretical analysis. The second step is to design the controller, which is a mathematical function that maps the measured output to the control input. There are several types of controllers, such as proportional-integral-derivative (PID) controllers, model-based controllers, adaptive controllers and robust controllers. The choice of the controller depends on the characteristics of the plant and the performance requirements. The third step is to implement the controller in hardware or software and test its performance on the actual plant. The fourth step is to tune the controller parameters to optimize the performance criteria. This can be done through trialand- error methods, optimization algorithms, or system identification techniques [2,3].
One of the key concepts in control theory is feedback. Feedback refers to the process of measuring the output of the plant and using it to adjust the control input. Feedback is essential for achieving stability and robustness in a control system. Without feedback, the control system would be open-loop, which means that the control input is based only on the desired setpoint and does not depend on the actual behavior of the plant. Open-loop control systems are not robust to disturbances or uncertainties, as they cannot adapt to changes in the plant behavior. Feedback control systems, on the other hand, can adapt to changes in the plant behavior and maintain the desired performance [4].
Control theory is a branch of engineering and mathematics that deals with the design and analysis of systems with the aim of achieving a desired output. It is concerned with understanding how to manipulate the inputs to a system to achieve a desired output, given that the system may be affected by disturbances, uncertainties and other external factors. Control theory has numerous applications in different fields such as robotics, aerospace, chemical engineering and many others. In this essay, we will explore the basics of control theory, its applications and the different types of controllers [5,6].
At its core, control theory is about feedback. Feedback is the process by which the output of a system is measured and used to adjust the inputs to the system to achieve a desired output. Feedback is essential because it allows us to compare the actual output of the system to the desired output and make adjustments to the inputs to ensure that the system behaves as we want it to. Feedback can be positive or negative depending on whether it reinforces or counteracts the behavior of the system.
The basic components of a control system are the plant, the controller and the feedback loop. The plant is the system being controlled, the controller is the device or algorithm that adjusts the inputs to the plant based on the feedback and the feedback loop is the mechanism by which the output of the plant is measured and fed back to the controller. The controller takes the feedback signal and uses it to adjust the inputs to the plant in such a way that the output of the plant matches the desired output.
There are many different types of controllers, each with its own strengths and weaknesses. One of the most common types of controllers is the proportionalintegral- derivative (PID) controller. The PID controller is a type of feedback controller that uses three terms to adjust the inputs to the plant. The proportional term adjusts the inputs in proportion to the error between the actual output and the desired output. The integral term adjusts the inputs based on the accumulated error over time and the derivative term adjusts the inputs based on the rate of change of the error. PID controllers are widely used in industrial control systems and have proven to be effective at regulating many types of systems.
Another type of controller is the state feedback controller. The state feedback controller is a more advanced type of controller that uses a mathematical model of the system being controlled to determine the appropriate inputs. The state feedback controller requires a good understanding of the system being controlled and can be difficult to implement in practice. However, state feedback controllers can be very effective at controlling complex systems.
One important concept in control theory is stability. A system is said to be stable if its output remains bounded for all time in response to any input. Stability is critical because an unstable system can behave unpredictably and cause damage or harm. There are different types of stability, including asymptotic stability, which means that the output approaches a steady state as time goes on and Lyapunov stability, which means that the output remains close to a certain value over time. Stability analysis is an important part of control system design because it helps ensure that the system will behave predictably and safely.
Control theory has numerous applications in different fields. In aerospace engineering, control theory is used to design flight control systems that ensure the safety and stability of aircraft. In robotics, control theory is used to design controllers that enable robots to move and interact with their environment. In chemical engineering, control theory is used to design controllers that regulate chemical reactions and maintain the desired temperature and pressure in chemical processes.
Another key concept in control theory is the concept of stability. Stability refers to the property of a system that determines its behavior over time. A stable system is one that remains bounded over time, meaning that its output does not diverge to infinity.
None.
No conflict of interest.
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at
Google Scholar, Crossref, Indexed at