Emmanuel Barrag�?¡n Munoz, Arturo Minor Martinez,Daniel Lorias, Ignacio Hernandez
CINVESTAV-IPN, Mexico
CONACYT Instituto Nacional de Rehabilitaci�?³n, Mexico
Posters & Accepted Abstracts: J Biosens Bioelectron
Intelligent walker linked by a cellular based on android for assistance Gait (IWLCAG) is an autonomous system with the ability to care for the human gait based on the modification of aluminum frame walker rollator. IWLCAG is equipped with a pair of DC motors for motion control by differential drive and has an array of ultrasonic sensors for detecting objects. As user feedback are placed in the grips haptic interfaces, the system has the ability to detect a possible imbalance of the user and send a blocking state to prevent the fall. In addition to detecting objects in front, it slows down while approaching the obstacle to avoid contact and stop completely. For configuration, monitoring and display of the recorded values, an application is created in Android 5.1. The system has three modes: manual control, automatic and remote control. For manual control, the user has buttons on the handles for straight forward, rotation and reverse. In automatic mode, the system detects steps by acceleration records of the gait and the walker moves forward in proportion. In remote control mode, cell is used as a control interface using accelerometers phone to control the direction of the walker and a pair of buttons indicate whether to go forward or backward. In the Android app, we can generate a text file records accelerations during walking and share through email. In addition to monitoring the distances detected by ultrasonic sensors, it set the speed, enable or disable haptic feedback and modify ultrasonic sensing distances. Finally with MATLAB 8.3, the acceleration signals of the text file is analyzed by applying a mean filter, a butterworth lowpass filter of fourth grade cutoff frequency 6Hz with the magnitude of the acceleration of the three axes recorded during the gait are detected and steps are counted, the number of steps and time registration cadence of the gait is obtained and the RMS value of the signal can be obtained.
Emmanuel Barragán Muñoz has completed his major as a Bionic Engineer from Unidad Profesional Interdisciplinaria en Ingeniería Tecnologías Avanzadas from Instituto Politécnico Nacional. He has worked in medical devices hospitals and companies. He is currently pursuing Master’s in Bioelectronics in the Cinvestav in México City.
Email: ebarraganm@cinvestav.mx
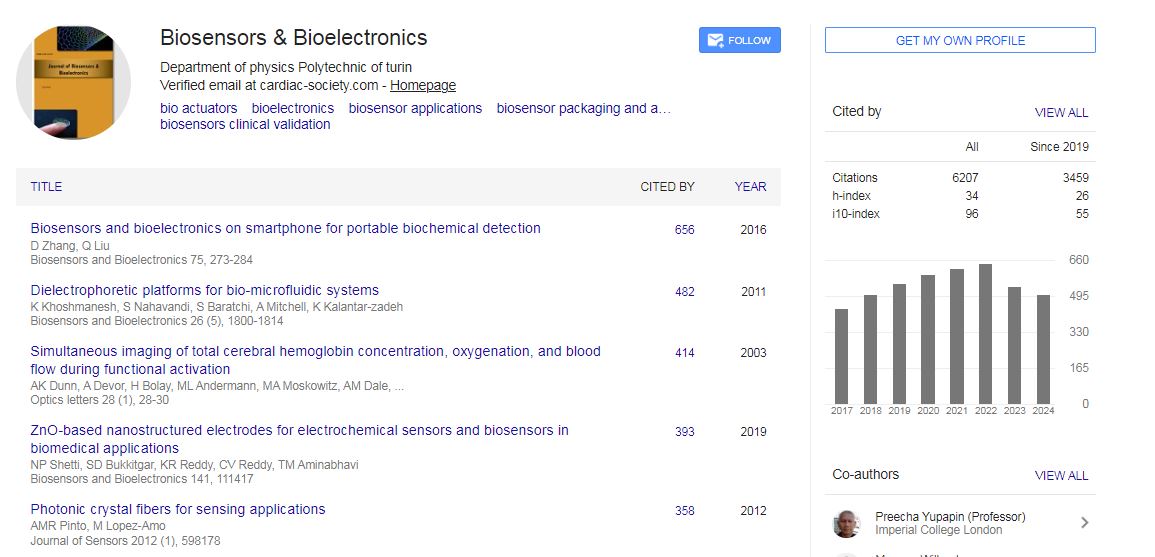
Biosensors & Bioelectronics received 6207 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 