Yoichiro Sato, Hiroshi Nagasaki and Norimasa Yamada
Hokkaido University of Science, Japan
Tohoku Bunka Gakuen University, Japan
Chukyo University, Japan
Scientific Tracks Abstracts: J Health Med Informat
As the central nervous system controls whole-body motion, which involves multi-joint movement, certain problems regarding the number of variables controlled by the central nervous system arise (i.e., the ��?degree of freedom problem�). The central nervous system solves these problems, not by controlling joint movements, but rather by controlling only the task-dependent center of mass (COM) position of the whole body. Although uncontrolled joint movement should be organized in a coordinate manner to form the task-dependent COM position, it is unclear how the law joint coordination is organized. In the present study, we aimed to clarify the shape of joint coordination by elucidating the mutual relationship between the COM trajectory and joint movement during whole body motion. Downward squatting motions with five trunk angles were recorded by using a 3-D motion analysis system in eight healthy men. The trunk, thigh, and shank angles relative to the vertical line were calculated. Furthermore, the COM coordination in the sagittal plane was calculated using those angles. The COM trajectory showed an approximately vertical path in all trunk conditions, suggesting that the form of the COM trajectory depends on a motor-task. In addition, the COM vertical path suggests that the COM trajectory is constrained by biomechanical dynamics and minimum muscle torques. The shank angle decreased with an increase in the trunk angle, whereas the thigh showed a constant angle. This result suggests that the shank and trunk angles form the COM vertical path and the thigh angle adjusts the COM height. These findings demonstrate that the joints are organized into a lawful coordinative structure to make up the task-dependent COM trajectory. The present findings can contribute to improving motor abilities in healthcare activity and effectiveness of activity of daily living.
Yoichiro Sato received a Philosophy of Doctor degree in Education from Human Movement Science course at Hokkaido University, Japan, in 2016. His main areas of research are in biomechanics and motor control as it relates to activities of daily living such as walking and sit-to-stand motion in healthy young adults, as well as biomechanics and prevention interventions of the fall in the elderly. He currently researches biomechanics of walking in healthy young adults using experiments and model simulations. Furthermore, he started an investigation into the biomechanics of the single leg standing in healthy young and elderly, which was supported by Grants-in-Aid for scientific research expenses. These studies would contribute to the wellbeing of the elderly.
Email: sato-y@hus.ac.jp
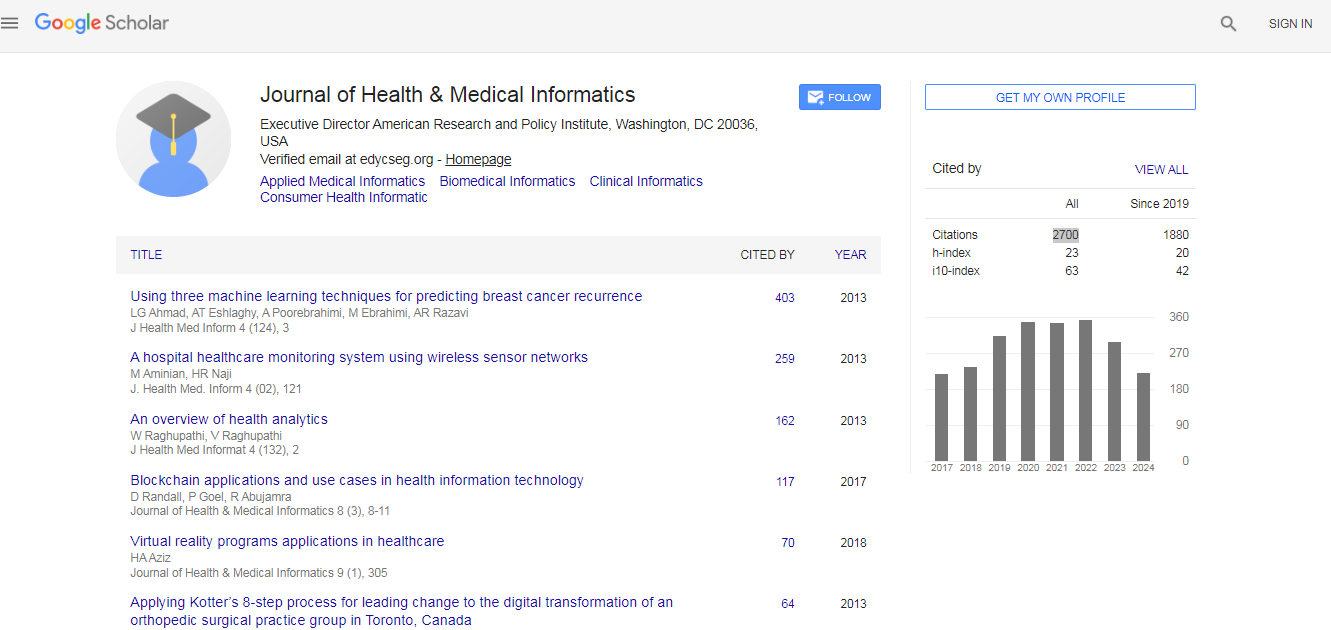
Journal of Health & Medical Informatics received 2700 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 