In-Ju Kim
Accepted Abstracts: Ind Eng Manage
Slips and falls are the second leading injury incident and have been recognized as a major threat to the safety of individuals not only in industry but also in daily living. Although many factors contribute to the slip and fall incidents, recent research has stressed the importance of surface roughness on slip resistance improvements. Rougher floors generally enhance traction properties under contaminated environments, but, it is unknown what roughness scales on the floor surface are required for effective controls of slip resistance performance. This study aimed to investigate slip resistance properties under two high slippery environments: soapy and oily surfaces and identify operative levels of floor surface roughness to support optimal slip resistance performance. Dynamic friction tests were conducted using 3 shoes and 9 floor specimens under soap suds- and machine oil-covered highly lubricated environments. The test results showed that significant effects of floor-type on dynamic friction coefficient were found in both contaminated conditions. Under the soapy condition, floors with 18 to 52 μm in Ra roughness scale seemed to represent an optimal range of surface roughness whilst under the oily condition; floors with 35 to 52 μm in Ra roughness scale seemed to represent an optimal range of surface roughness. However, the higher slip resistance performance was not supported by the rougher floors (>52 μm in Ra roughness scale). Those findings signify that walkways and/or floor surfaces seem to require different levels of coarseness for different types of environmental conditions to effectively and efficiently control slip and fall incidents.
Slips and falls are the second leading injury incident and have been recognized as a major threat to the safety of individuals not only in industry but also in daily living. Although many factors contribute to the slip and fall incidents, recent research has stressed the importance of surface roughness on slip resistance improvements. Rougher floors generally enhance traction properties under contaminated environments, but, it is unknown what roughness scales on the floor surface are required for effective controls of slip resistance performance. This study aimed to investigate slip resistance properties under two high slippery environments: soapy and oily surfaces and identify operative levels of floor surface roughness to support optimal slip resistance performance. Dynamic friction tests were conducted using 3 shoes and 9 floor specimens under soap suds- and machine oil-covered highly lubricated environments. The test results showed that significant effects of floor-type on dynamic friction coefficient were found in both contaminated conditions. Under the soapy condition, floors with 18 to 52 μm in Ra roughness scale seemed to represent an optimal range of surface roughness whilst under the oily condition; floors with 35 to 52 μm in Ra roughness scale seemed to represent an optimal range of surface roughness. However, the higher slip resistance performance was not supported by the rougher floors (>52 μm in Ra roughness scale). Those findings signify that walkways and/or floor surfaces seem to require different levels of coarseness for different types of environmental conditions to effectively and efficiently control slip and fall incidents.
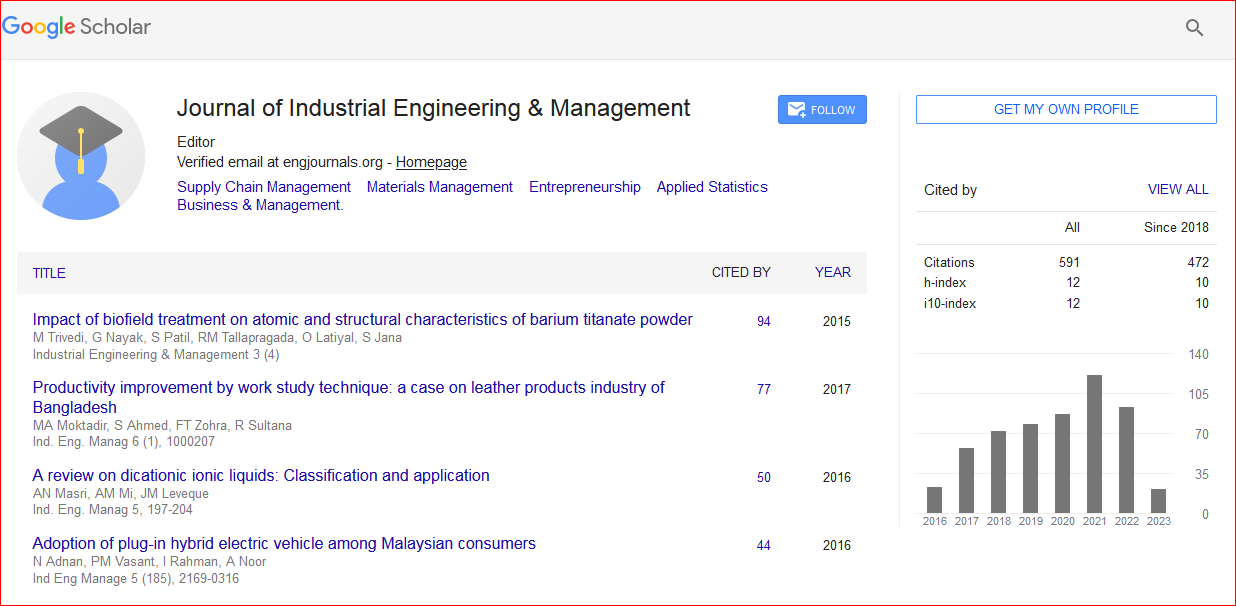
Industrial Engineering & Management received 739 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 